В этом эксперименте мы вращаем сервопривод на угол, задаваемый потенциометром. Прочтите перед выполнением:
СПИСОК ДЕТАЛЕЙ ДЛЯ ЭКСПЕРИМЕНТА
- 1 плата Arduino Uno;
- 1 беспаечная макетная плата;
- 1 сервопривод;
- 1 конденсатор емкостью 220 мкФ;
- 1 потенциометр;
- 11 проводов «папа-папа».
ПРИНЦИПИАЛЬНАЯ СХЕМА
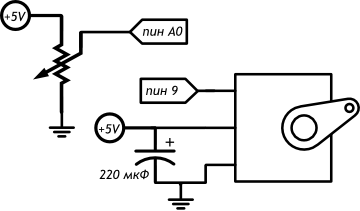
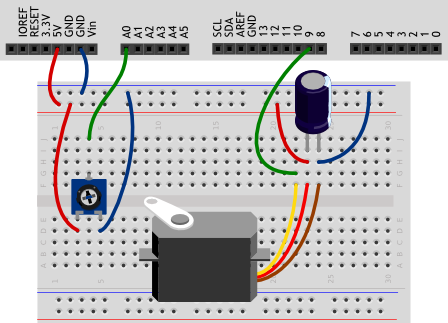
СХЕМА НА МАКЕТНОЙ ПЛАТЕ
ОБРАТИТЕ ВНИМАНИЕ
- Конденсатор в данной схеме нам нужен для того, чтобы при включении сервопривода избежать просадки питания платы.
- Не забывайте про то, что нужно соблюдать полярность элетролитического конденсатора. Короткая ножка (со стороны белой полосы на корпусе) — «минус».
- Вы можете соединить провод сервопривода с макетной платой проводами «папа-папа»: коричневый это земля, красный — питание, оранжевый — сигнал.
- В данном эксперименте мы подключаем питние сервопривода к 5V-выходу Arduino. С одним сервоприводом плата справится, но если в каком-либо проекте вам нужно больше сервоприводов, используйте специальные платы-драйвера с отдельным источником питания для сервоприводов.
СКЕТЧ
скачать скетч для Arduino IDE
// управлять сервоприводами (англ. servo motor) самостоятельно
// не так то просто, но в стандартной библиотеке уже всё
// заготовлено, что делает задачу тривиальной
#include <Servo.h>
#define POT_MAX_ANGLE 270.0 // макс. угол поворота потенциометра
// объявляем объект типа Servo с именем myServo. Ранее мы
// использовали int, boolean, float, а теперь точно также
// используем тип Servo, предоставляемый библиотекой. В случае
// Serial мы использовали объект сразу же: он уже был создан
// для нас, но в случае с Servo, мы должны сделать это явно.
// Ведь в нашем проекте могут быть одновременно несколько
// приводов, и нам понадобится различать их по именам
Servo myServo;
void setup()
{
// прикрепляем (англ. attach) нашу серву к 9-му пину. Явный
// вызов pinMode не нужен: функция attach сделает всё за нас
myServo.attach(9);
}
void loop()
{
int val = analogRead(A0);
// на основе сигнала понимаем реальный угол поворота движка.
// Используем вещественные числа в расчётах, но полученный
// результат округляем обратно до целого числа
int angle = int(val / 1024.0 * POT_MAX_ANGLE);
// обычная серва не сможет повторить угол потенциометра на
// всём диапазоне углов. Она умеет вставать в углы от 0° до
// 180°. Ограничиваем угол соответствующе
angle = constrain(angle, 0, 180);
// и, наконец, подаём серве команду встать в указанный угол
myServo.write(angle);
}
ПОЯСНЕНИЯ К КОДУ
- В данном эксперименте мы также имеем дело с объектом, на этот раз он нужен для простого управления сервоприводом. Как отмечено в комментариях, в отличие от объекта
Serial, объекты типа Servo нам нужно явно создать: Servo myServo, предварительно подключив библиотеку <Servo.h>.
- Далее мы используем два метода для работы с ним:
myServo.attach(pin) — сначала «подключаем» серву к порту, с которым физически соединен его сигнальный провод. pinMode() не нужна, метод attach() займется этим.myServo.write(angle) — задаем угол, т.е. позицию, которую должен принять вал сервопривода. Обычно это 0—180°.
myServo здесь это имя объекта, идентификатор, который мы придумываем так же, как названия переменных. Например, если вы хотите управлять двумя захватами, у вас могут быть объекты leftGrip и rightGrip.- Мы использовали функцию
int() для явного преобразования числа с плавающей точкой в целочисленное значение. Она принимает в качестве параметра значение любого типа, а возвращает целое число. Когда в одном выражении мы имеем дело с различными типами данных, нужно позаботиться о том, чтобы не получить непредсказуемый ошибочный результат.
ВОПРОСЫ ДЛЯ ПРОВЕРКИ СЕБЯ
- Зачем нужен конденсатор при включении в схему сервопривода?
- Каким образом библиотека
<Servo.h> позволяет нам работать с сервоприводом?
- Зачем мы ограничиваем область допустимых значений для
angle?
- Как быть уверенным в том, что в переменную типа
int после вычислений попадет корректное значение?
ЗАДАНИЯ ДЛЯ САМОСТОЯТЕЛЬНОГО РЕШЕНИЯ
- Измените программу так, чтобы по мере поворота ручки потенциометра, сервопривод последовательно занимал 8 положений: 45, 135, 87, 0, 65, 90, 180, 150°.
- Предположим, что сервопривод управляет шторкой, и нам нужно поддерживать постоянное количество света в помещении. Создайте такой механизм.
С оригиналом статьи вы можете ознакомиться на сайте Amperka.ru
ЭКСПЕРИМЕНТ 16 | ОГЛАВЛЕНИЕ | ЭКСПЕРИМЕНТ 18 |